技术资料
自动码垛机器人的相关结构技术说明
发布时间:2015-05-22 14:57
作者:宏基自动化科技
本文由自动化包装流水线设备生产厂家——宏基自动化科技整理编撰,未经允许不得随意转载
自动码垛机器人的相关结构技术说明:
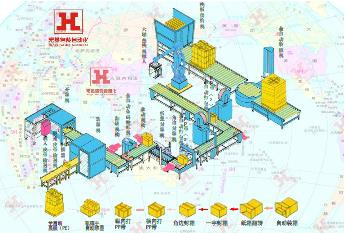
随着 21 世纪工业及经济的蓬勃发展以及对产品精度的要求不断提高 , 机器人加工逐渐成为一种被普遍应用的加工方法 , 而码垛是包装自动化技术领域一门新兴技术 , 码垛按照一定模式 , 一件件堆成码垛 , 以便使单元化的码垛实现物料的搬运、装箱、 卸货等活动 。
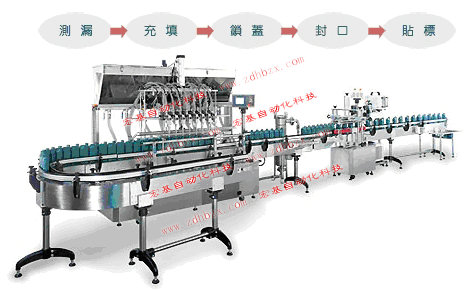
随着工业化大生产规模的扩大 , 促使码垛自动化 , 以加快包装流水线的生产速度 , 保护工人的安全和健康 , 同时也能获得整齐一致的物垛 , 减少物料的破损和浪费。随着生产规模的扩大和自动化水平的提高 , 码垛机器人柔性、 处理能力及可靠性正在不断地升级 , 应用场合也逐渐在扩大 , 因此开发高性能、 低成本、 人性化的码垛机器人将有广阔的市场前景。
水平及垂直关节的结构设计
水平及垂直关节部分都各有一个电机 , 每个电机藉由控制同步带轮及齿型带的旋转来使滚珠丝杠转动 , 间接带动其滑块及拖板。这样的运动可以使机器人实现大臂上下运动、 小臂前后运动 , 且可以满足驱动大惯性力矩负载和快速运动、 精确定位的要求。
腰部底座的结构设计
腰部底座的运动是藉由底部的伺服电机来控制空心轴 , 进而使机架实现腰部旋转 , 并且经实验证明 : 底部基座及法兰的结构设计可以降低机械关节动时的工作噪音 , 而通常被搬运的物品只需要从一个位置移到另一个位置上 , 绕垂直于水平方向的轴旋转以调整放置方向 , 所以此结构满足现场工作的需求。
腕部及机器人手爪的结构设计
腕部电机控制手爪连接盘带动机器人手爪旋转。该机构主要完成码垛操作中夹紧箱状物体的动作 , 机器人手爪底部安装气源入口及气源处理和压力继电器 , 工作时侧夹板开合由通电磁阀控制汽缸活塞杆缩回 , 带动两侧板互相靠近 , 从而完成夹紧动作 , 手爪板完全打开时 , 可以使张开的手爪之间的宽度大于包装箱的宽度 ; 而另一个通电磁阀控制气缸实现手爪开合 , 以保证机械手的手爪准确、 可靠地落于生产线运输辊之间或拖盘上。
软件控制系统的设计
开放式通用机器人控制系统的软件应在标准的语言环境下进行开发 , 做到可移植 , 易修改、 重构及扩充 ,并能提供用户接口和程序接口 , 所以采用面向对象的模块化的工程设计方法。与硬件结构相对应 , 控制系统软件也分为上、 下两层 , 各个模块都具有自己独立的功能 , 相互间调用关系简单 , 为了适应时刻变化的对象 , 必须使伺服系统的动作具有某种柔性 , 这种柔性是通过计算机程序来实现的 , 故称为软伺服。
码垛机器人机械结构设计合理、 负载能力大 , 且对硬纸箱、 塑料箱、 袋状物、 盒装物等搬运码垛 , 只需更换手爪即可。因此 , 除了用于拆垛、 码垛以外 , 码垛搬运机器人还可以广泛用于包装自动化生产流水线行业中的物料搬运、 分拣等领域 , 具有广阔的市场前景。
转载原创文章请注明:文章转载自:宏基自动化科技有限公司